现代控制实验室(II)配备固高科技(深圳)有限公司生产的直线倒立摆系统用于教学和科研。倒立摆是进行控制理论研究的典型实验平台。由于倒立摆系统的控制策略和杂技运动员顶杆平衡表演的技巧有异曲同工之处,极富趣味性,而且许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等等,都可以通过倒立摆系统实验直观的表现出来,因此在欧美发达国家的高等院校,它已成为必备的控制理论教学实验设备。学习自动控制理论的学生通过倒立摆系统实验来验证所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。倒立摆不仅仅是一种优秀的教学实验仪器,同时也是进行控制理论研究的理想实验平台。由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法,相关的科研成果在航天科技和机器人学方面获得了广阔的应用。二十世纪九十年代以来,更加复杂多种形式的倒立摆系统成为控制理论研究领域的热点,每年在专业杂志上都会有大量的优秀论文出现。
1、实验系统
倒立摆系统组成:运动控制卡、电控箱、直线倒立摆基座、信号电缆、二级倒立摆摆体组件、角度编码器
基于固高科技倒立摆系统可以完成以下实验内容:经典控制理论内容包括实际系统模型的建立、根轨迹分析和控制器设计、频率响应分析、PID控制分析等内容,现代控制理论内容主要包括状态空间极点配置和线性最优控制LQR方法。
实验项目覆盖广,适合于自动控制及相关专业本科、研究生等学习经典控制理论和现代控制理论之用。学生通过选择不同方法,确定不同参数,观察不同的实验效果,可以深入理解控制方法之间的差异以及参数对控制系统性能指标的影响。直线一级倒立摆是单入双出系统,输入量为小车的加速度,输出量为摆杆角度和小车位移。作为典型的控制理论实验平台,基于单入双出模型的复合校正实验项目,亦可以作为电机类相关专业电机控制算法的研究平台。
2、主要承担的实验课程:
固高倒立摆系统适应如下课程的实验:自动控制原理,现代控制理论,现代控制工程,最优控制,非线性系统控制,智能控制,模糊控制和神经网络控制等等。
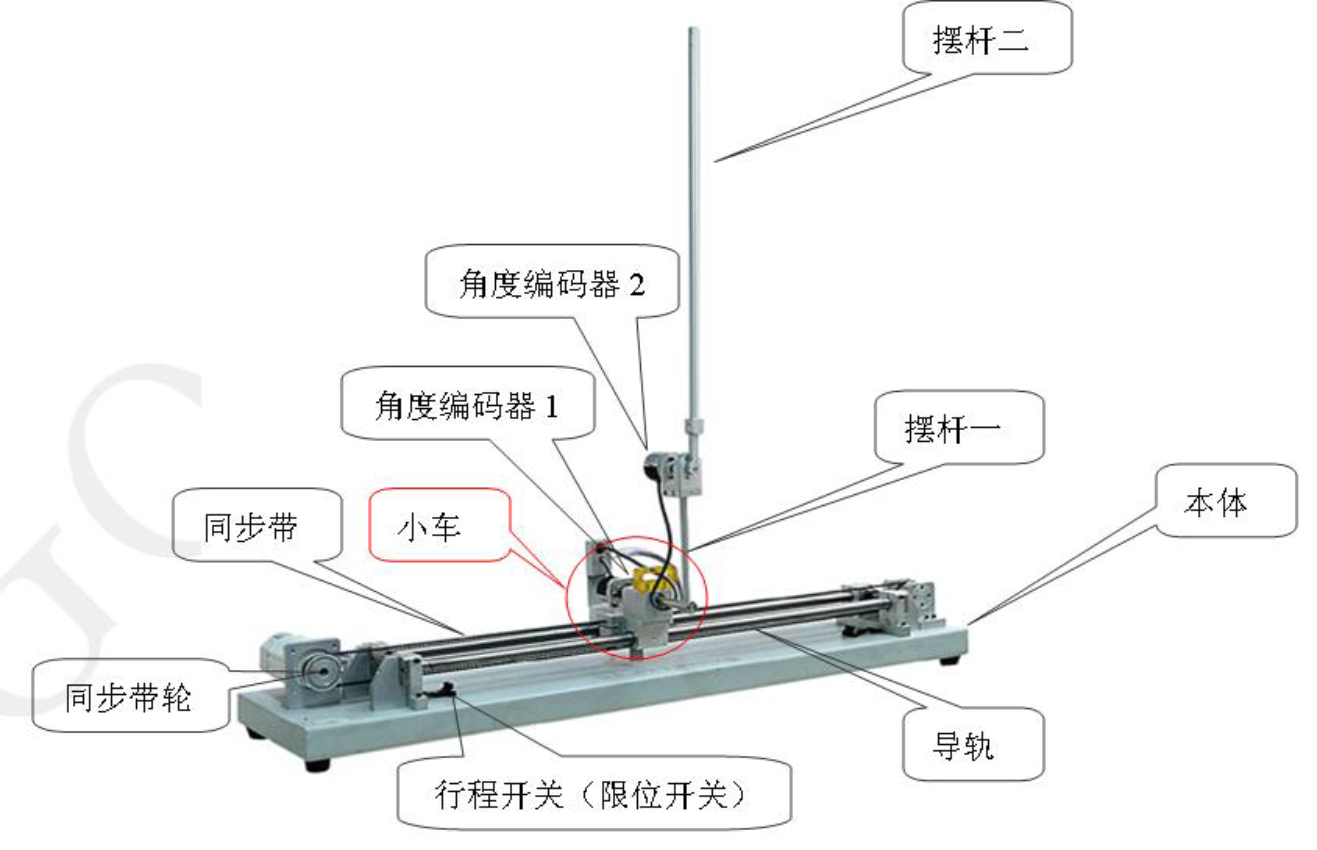
直线倒立摆系统